Harold's RC Cars
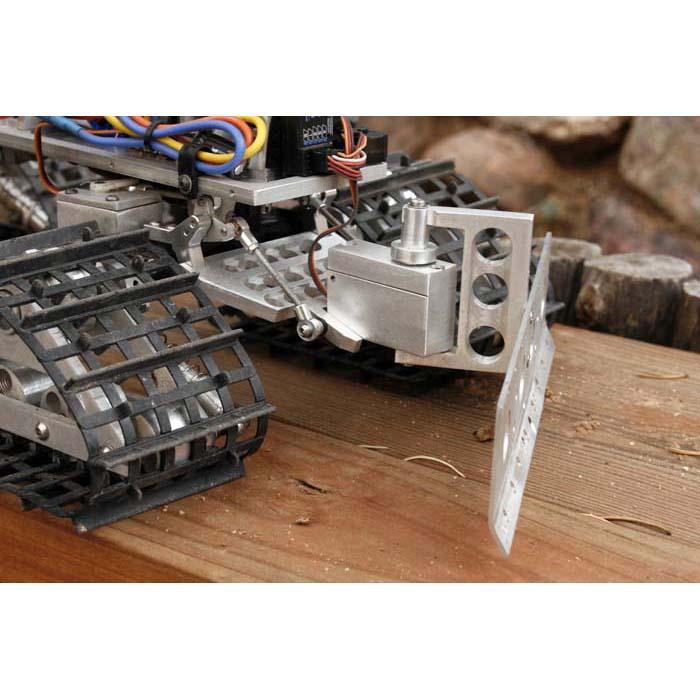
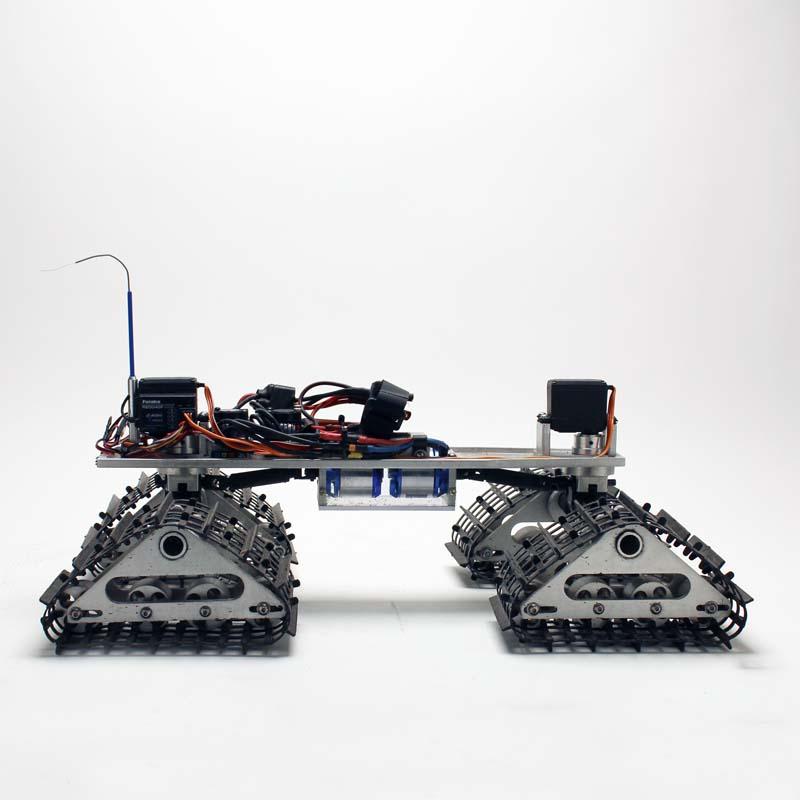
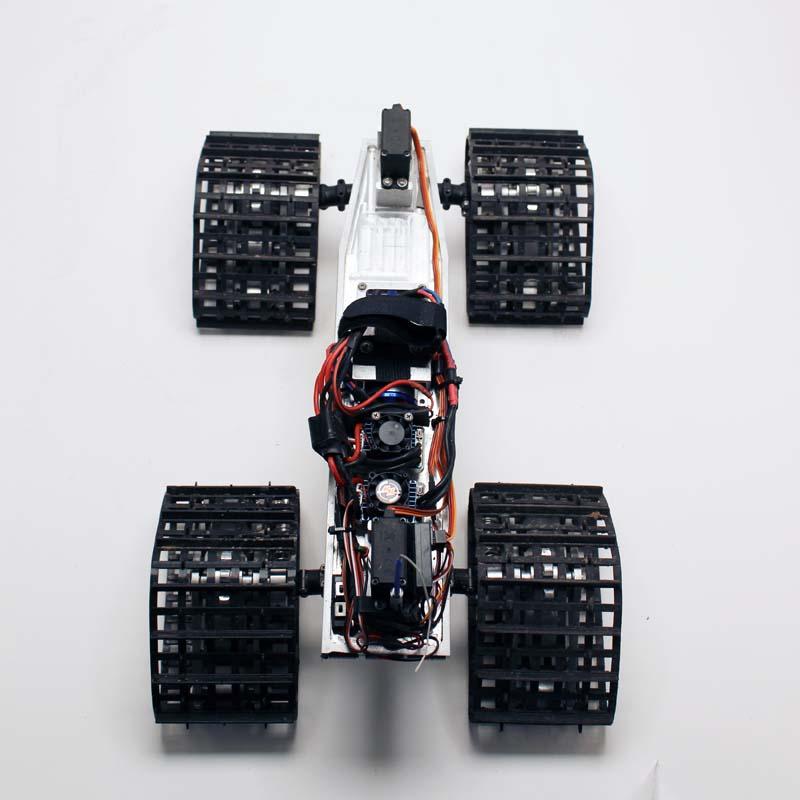
Tucker style snowcat racerOne of the guys on the Snowcat board asked if I could design a Tucker style steering system for a r.c. project. Instead of having tank like steering or having the tracks turn, the axles pivots. I used RC4WD Worminator straight axles and made a center mount that would attach to a servo to be able to pivot the axle. The center mount pivots on thrust bearings recessed into the bottom of the chassis. I originally used 1 brushless motor connected to a transfer case to drive both axles, it was pretty slow. I later switched to 2- 1500kv brushless motors, one for each axle. The tracks are driven by a sprocket that sits between the inner & outer plates and connects directly to the axles. Two of the 4 lower wheels are adjustable to set the track tension. The shocks mounted on the inside of the track housings allow the tracks to follow the terrain. The tracks are stock Kyosho SR tracks. The shocks are rc4wd 80mm units. The front plow setup had to be self contained on the front axle since the axle pivots. The servo mounted on the plow plate moves the blade right to left. Another servo mounted on the back of the axle moves the blade up & down. The servos are Spectrum A5060. After all the fabrication for the plow was finished I found I preferred to run it without the plow. I decided to go with a racer/runabout look. The body is a Team Associated RC 10 body, the decals are from a HPI Porsche project.
|